

A recent study on hand dexterity in humans and other primates has been published in the Journal of the Royal Society Interface, combining the expertise of robotics engineers Thomas Feix and Aaron Dollar (Yale University), palaeanthropologist Tracy Kivell (University of Kent) and primatologist Emmanuelle Pouydebat (CNRS Paris). The study used measurements of the digits to create a kinematic model of the thumb and index finger in several species of living primates and fossil ancestors of humans. It is the first model to evaluate how the digits can move to manipulate objects of different sizes, rather than simply looking at static postures. They found that a long thumb and high joint mobility alone do not necessarily yield high precision manipulation, and that humans have the highest manipulation potential, especially for small objects. The study also revealed that several fossil humans, even early ancestors like Australopithecus afarensis, may have had more human-like manipulative abilities.
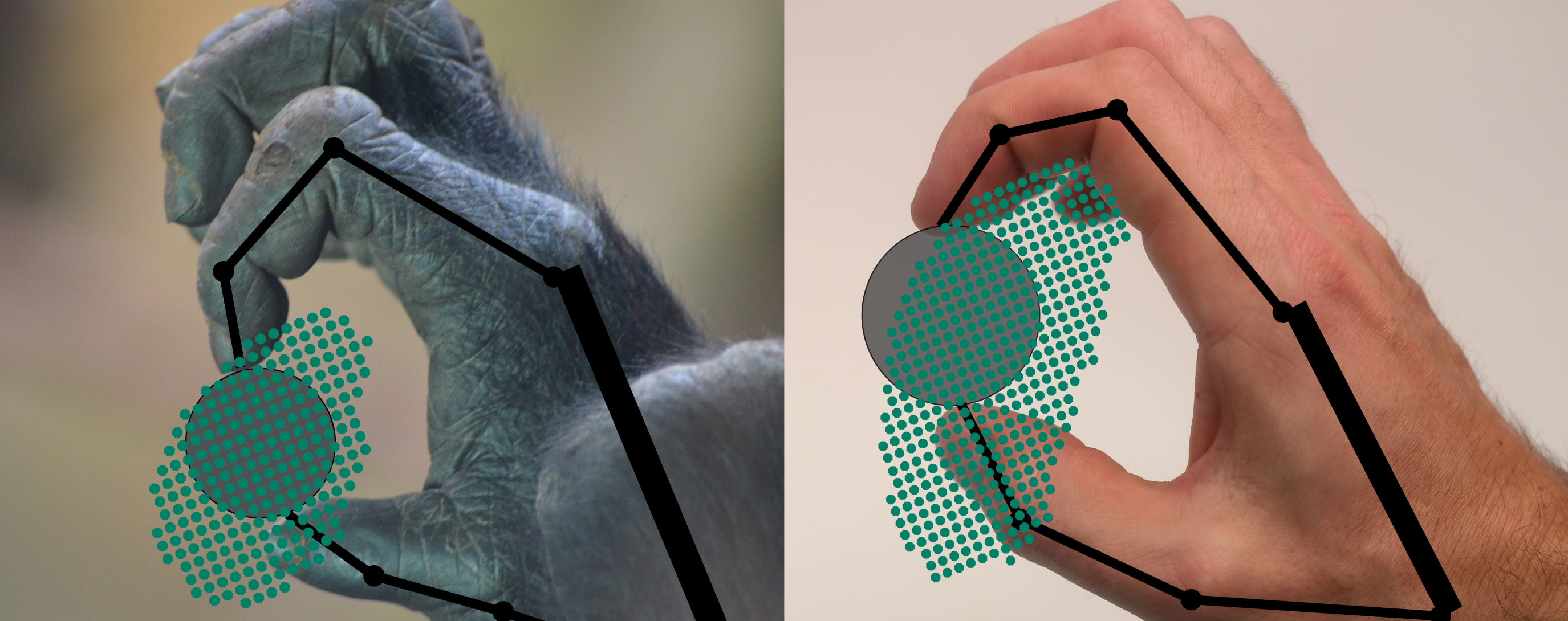
Chimp and human hand showing variation in the precision grip manipulation between the thumb and index finger.
Photo credit:T. Feix and E. Pouydebat