
A new paper is out based on work done while I was at the Hamlyn Centre, Imperial College. This work was led by Siyang Zuo, who is now an assistant professor at Tianjin University in China, and was overseen by Prof Guang-Zhong Yang, who is Director of the Hamlyn Centre. It’s the final publication from a long-running collaboration to develop custom scanning devices for endomicroscope probes.
Publication: Flexible Robotic Scanning Device for Intraoperative Endomicroscopy in MIS,
Siyang Zuo, Michael Hughes and Guang-Zhong Yang
The paper is online here: http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=7915746
It’s not open access, but you can see the author accepted version on the Kent Academic Repository.
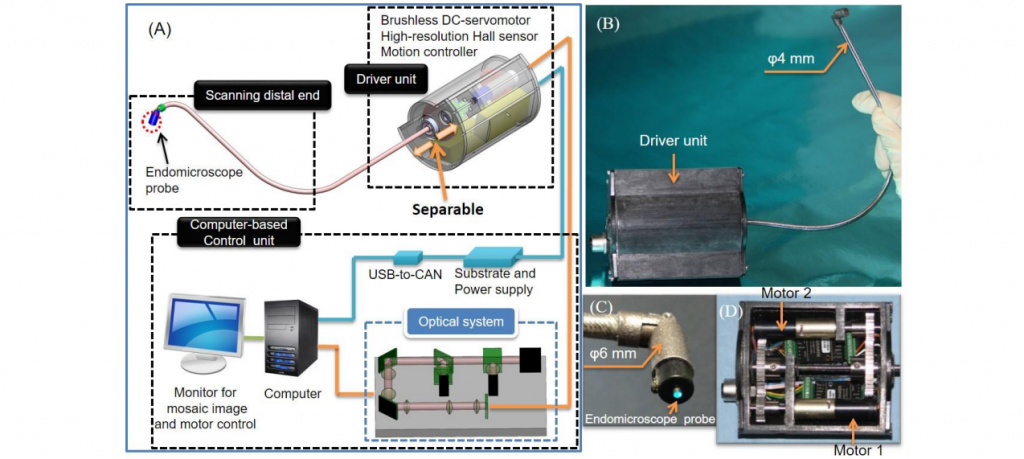
The idea was to have a small-diameter scanning device with a channel for an endomicroscope probe to be passed through. The endomicroscope can generate very high resolution images of tissue, but the diameter of the images is typically very small. The robot scans the endomicrocsope over the tissue, and individual images are stitched together (called mosaicking) to generate a larger image, still offering high resolution. This work is different from our previous scanning devices for breast surgery (such as this) because it allows for a flexible access route – a goal which comes with lots of additional challenges.